

全国客服热线:
0532-83790688
0532-83790688
Avago 的数字光电耦合器品种繁多,可满足 IPM 驱动器至数据通信等汽车隔离/绝缘应用需求,与传统的光电耦合器相比,Avago 的新款 ACE Q100 级光电耦合器,即ACPL-K4xT/K7xT 系列,具有明显较低的LED 驱动电流,由此减少了系统的功耗。此外,独特的扩展型表面贴装套件还减少了光耦的引脚和体积,同时加大了绝缘间隙和爬电距离,来提升了额定绝缘电压。ACPL-K4xT/K7xT 系列的数字光电耦合器可大范围的应用于 IPM 驱动器、CAN 总线接口和 HEV、PHEV 和 EV 系统内离散的数字信号隔离方面。
由于汽车系统采用的电子和电气元件数量日益增多,使系统变得更容易受到瞬变电路和短路影响,因此一定要采取额外的保护以防止损害关键的系统。这在一台电动马达驱动混合动力汽车或全电动汽车时就显得尤其重要。在这种情况下,高达几百伏的高电压就可能会被引入到动力系统中。此外,除了高压功率转换之外,像CAN(控制局域网)网络之类的数据通信子系统也必须加以保护,以使高电压无法馈穿 ECU(发动机控制单元)、BMS(电池管理系统)、温控系统等其他子系统。文中附有一些接口电路示例图,说明了光电耦合器如何应用于这些领域的原理。
历经35 年以上的改进,LED 以精湛的制造工艺铸就深厚优势。 Avago 利用这一经验为许多市场提供了可靠性高的 LED 光电耦合器,大范围的应用于工业、军事和太空等领域。可靠性的关键之处在于 Avago 为实现汽车 ACE Q100级性能而开发的 LED 加工技术。
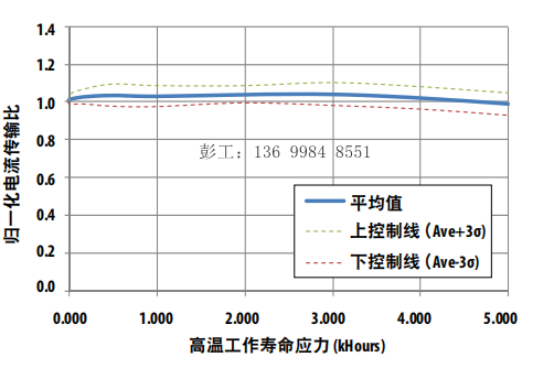
Avago 光电耦合器在温度为 150°C 和 LED 驱动电流为 20mA 的条件下通过了应力测试。电流传输比 (CTR) 的参数与 LED 的光输出量成正比。CTR-时间图,如图 1[1]所示,可用来间接测量LED 在整个生命周期内的退化率。正如图中所示,应力测试 5000 小时后就没有退化。基于这一测量即可预测推断,其汽车应用中的工作寿命将长达100 多年。
相对于具有竞争力的光耦合器,Avago 数字光电耦合器除了延长工作寿命之外,还明显降低了 LED 驱动电流(参见表 1)。例如,1Mbps(不归零编码)功能型 ACPL-K43T/44T 系列光电耦合器[2]具有三种典型的额定驱动电流:0.8mA、1.5mA 和 10mA 配置。此外,Avago 的高速 CMOS 光电耦合器系列 ACPL-K72T/75T 仅需 4mA 驱动电平。这种相比来说较低的电平有利于系统模块设计,因为无需额外的电流缓冲器通过微控制器的输出引脚来直接驱动LED。
让我们用ACPL-K43T 作为示例来探究一下真正的功耗。确定功耗的系统状况如下:50% 占空比 (DC) 时输入LED电流为 1.5mA,输出上拉电阻 10kW,输出电源电压为 5V:
ICCL= 输出低电流,ICCH= 输出高电流, VCC= 输出供电电压。
电气安全隔离是全球各大监督管理的机构对于高压系统的要求。光电耦合器不仅是传输控制信号的关键性隔离元件,而且还提供低压电路与高压设备之间的高度隔离。光电耦合器一定要符合IEC 60747-5-5、DIN/EN 60747-5-2 和 UL 1577等通用半导体元件的电气安全标准。适当的光电耦合器可按设施安全要求做选择。
工作电压、安装类别和绝缘等级均为选择光电耦合器所需的一些关键的额定设施安全参数。依据工业、家庭、办公和IT 设备的安全标准,AC 线路电压供电的电气设备常常要加强的绝缘等级。除了额定绝缘电压之外,某些设施安全标准还专门纳入外部间隙、爬电距离和绝缘距离(DTI,也简称为内部间隙)以及相对漏电起痕指数(CTI) 等基本绝缘参数。表 2 示有采用 SO-5 和扩展型 SO-8 封装的 Avago 数字光电耦合器绝缘参数,而图 2 则标明了扩展型 SO-8 套件物理方面的参数。
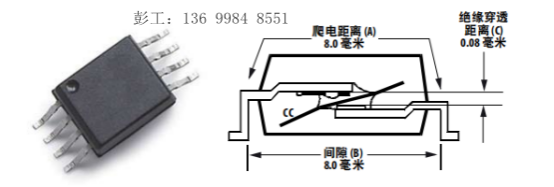

SSO-8 套件能将外部爬电距离和电气间隙增至 8 毫米以上,并具有高达 1140VPEAK 的最大工作绝缘电压 。 为实现较高的电池组电压和变频器总线 套件可提供更多的绝缘空间。例如,设施安全标准 IEC 60950[3],《绝缘技术设备(包括电子商务设备)的安全》提出了有关爬电距离和电气间隙的要求。表3 中的参考数据表明在 2 级污染、IIIa 族材料(针对 ACPL-K43T 光电耦合器)和 II 类安装的情况下,200Vdc 和 400Vdc 的工作电压要求不同的间隙和爬电距离。因此,像 ACPL-M43T 这样的一个光电耦合器非常适合于 200V 电池系统,而 ACPL-K44T则适合于 400V 电池系统。
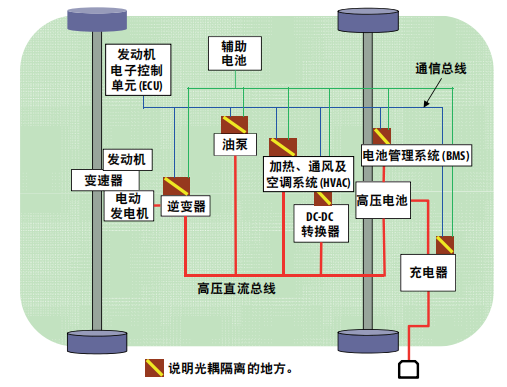
在一辆传统汽油发动机车内,低电压(12V) 电池利用底盘作为其地线,这在某种程度上预示着电流通路其实就是通过车身传输的。在电动车中,通常有两种电压系统:高电压和低电压。 EV 中的高压电池及其相连的设备是一个浮载系统,完全电气隔离于底盘和低压系统之外。事实上,像电机变频器和电池充电器等一些设备在检测到漏电流大于对底盘预设的阈值水平时就会停止工作。通信总线(如 CAN 总线)将一个信号从低压系统供电的控制器传输至各种高压设备。每个模块的主要接口点如图 3 所示,光电耦合器在各点被用来提供隔离边界,以确保没有漏电流汇集到底盘。 光电耦合器主要使用在于电动车内的 IPM 驱动逆变器、CAN 总线隔离和 SPI 隔离这三大方面。
电动车内的逆变器能转换DC 电池电压,以使电池能驱动 AC 异步电机或 DC 无刷电机。IGBT(绝缘门双极晶体管)是常见的功率转换设备,而 IPM(智能集成功率模块)[4]混合动力模块则在一个紧凑的封装结构内同时对IGBT 和门驱动电路提供功率。大多数 IPM,像 Fuji Electric(富士电机)的 Econo 7MBP150TEA060,还融合了过温检测、过流检测和反馈故障报警到微控制器的欠压保护功能。图 4 所示是一个典型的逆变器系统。
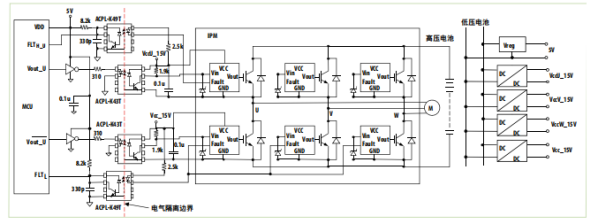
在这一系统图解中,隔离电路处于MCU 和 IPM 之间。六个 ACPL- K43T 数字光电耦合器能隔离 IPM 的六个门驱动器输入端(上下三个 IGBT 用于三个电源相位)。为减少该图的复杂性,仅对 U 相显示光电耦合器;V 相和W 相则需要更加多的光电耦合器。四个ACPL-K49T[5]光电耦合器隔离IPM 合成的故障反馈信号(三个用于各上相,一个用于下相)。
电源分布如图4 右侧部分所示。 光电耦合器的 5V 电源是直接由 12V 电池通过稳器转换而成的;Vcc_15V 电源则由一个隔离式 DC/DC 转换器产生,为所有低通道电路供电;三个附加的隔离式 DC/DC 转换器能输出 15V VccU/VccV/VccW,且彼此均处于浮载状态并单独为上通道电路供电。
车内CAN 总线网络连接着主机控制 ECU 和局域子系统,例如温控器、电池管理系统 (BMS)、牵引逆变器、油/液压泵和其他子系统。
图5 所示的光电耦合器在系统中也许会出现高压的局域设备和低压 CAN 总线之间提供电气隔离边界。这将确保稳定运行、消除电气噪声和防止子系统之间的干扰.
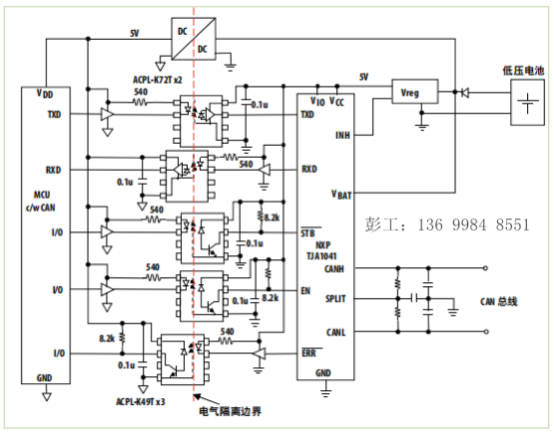
图5.光电耦合器在局域设备MCU(微控制器)与CAN总线收发器之间提供隔离
一个CAN 收发器子系统的示例显示了接口连接端如何配置为 NXPTJA1041 CAN 控制器的原理(图 5)。两个ACPL-K72T 光电耦合器能发送和接收 MCU 和 TJA1041 之间的数据。由于 -40°C 至 125°C 工作时候的温度范围内的最大传播延迟时间达 100ns,因此 ACPL-K72T 具有广泛的性能范围,包括汽车应用中所有的 125kbps、250kbps 和
500kbps 3 级高速 CAN 数据传输速率[6]。三个低速ACPL-K49T 光电耦合器分别为 STB、EN 和 ERR 的收发器引脚传输指令、状态或反馈信号。低压电池通过一个稳压器转化成 5V 电源对收发器供电,而一个隔离式 DC-DC 转换器则对 MCU 提供 5V 电源。
串行外设接口总线(SPI) 通常适用于处理器及其外围芯片之间,如汽车电池组电芯的电压监测系统。汽车的高压电池由多层电芯堆叠而成,而电芯数量多达一百多片。为了平衡充电期间的电池组电芯的电压或监控电池组驱动电机输电时的电芯能量,每个电芯的电压需要逐个测量,待模拟电压采集后,测量模块内的ADC会将其转换成数字数据并通过SPI总线传输给作为主设备的 BMS MCU。
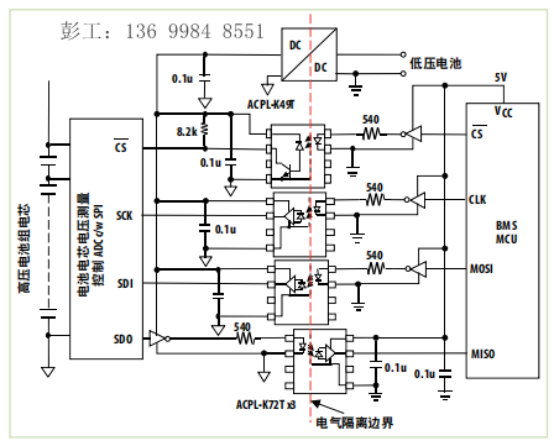
如图6 所示,典型的 4 线 SPI 接口包括时钟、数据输入/输出和芯片选择通道。三个高速 ACPL-K72T 光电耦合器接口数据输入/输出信号和时钟频率高达 2MHz,一个低速ACPL-K49T 将芯片选择状态从主/MCU 传输到从设备/ADC。一个隔离式 DC-DC 转换器对被控实线V 电源。 隔离边界为低电压电路至高电压电池组提供绝缘,并能防止因电池电压波动而引起的噪音干扰。
*博客内容为网友个人发布,仅代表博主个人自己的观点,如有侵权请联系工作人员删除。
联系人:彤起
手 机:0532-66912111
邮 箱:Tongqi@163.com
公 司:爱游戏在线官网
地 址:青岛市李沧区瑞金路1号(青岛汽车厂北1000米)
